
2.5m Telescope
The PRL 2.5m telescope is a state-of-the-art facility developed in collaboration with Advanced Mechanical and Optical Systems (AMOS), Belgium. It is a Ritchey–Chrétien system operating at f/8 with a wavelength coverage from 370–4000 nm.
The 2.5m primary mirror is supported by an advanced Active Optics system with 42 axial and 18 lateral actuators. Wavefront sensors continuously correct mirror deformations during observations.
The telescope provides a 25-arcmin unvignetted field of view at the main port and two side ports for specialized instruments, one equipped with a tip-tilt correction system.
→ View image gallery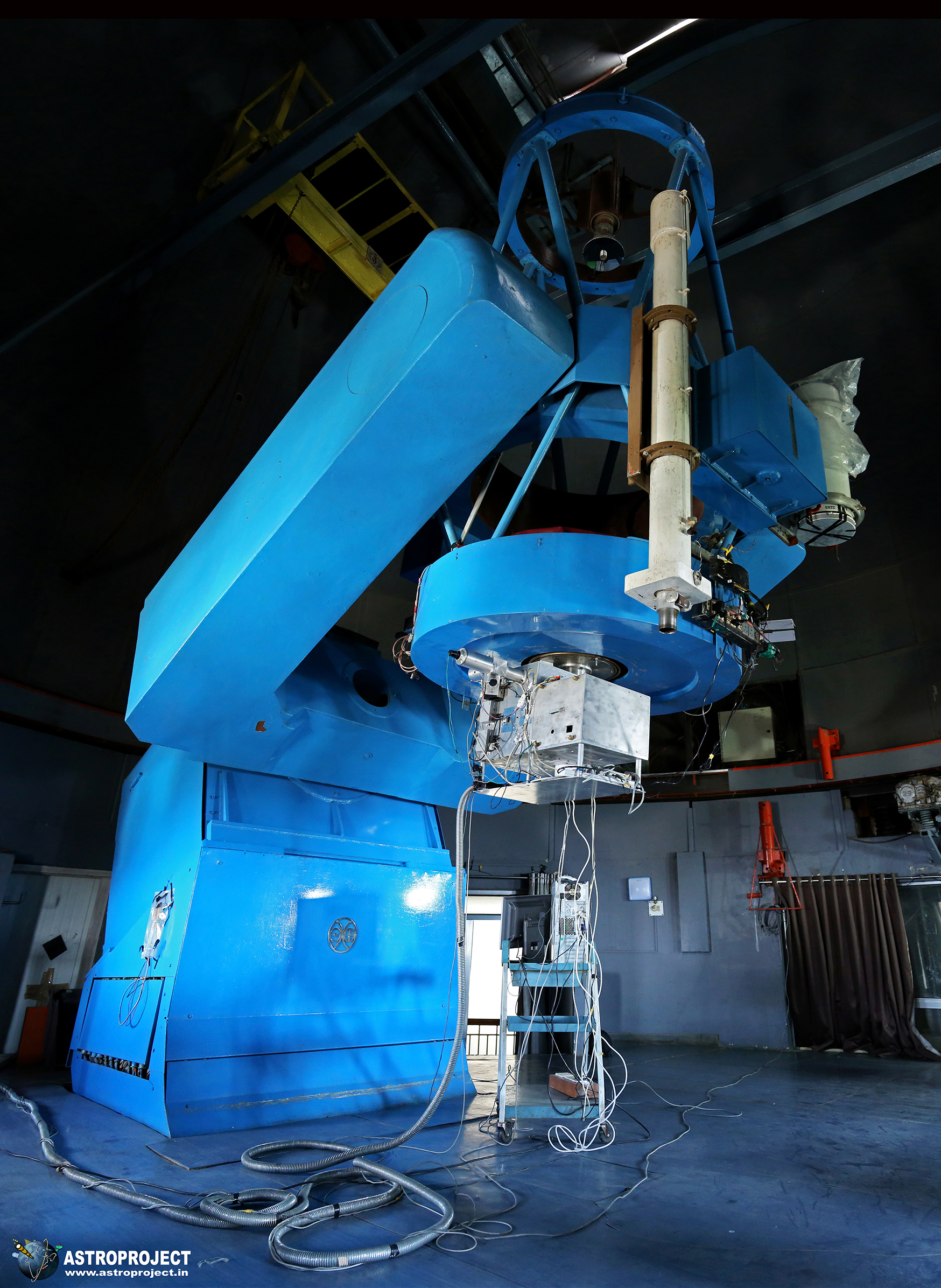
1.2m Telescope
The 1.2m telescope was designed and built indigenously by the SHAR Centre of ISRO. It is a fork-mounted equatorial telescope that has been operational since December 1994.
All original electronics have been upgraded by PRL engineers, with modern Linux-based control and in-house developed software.
The telescope supports both sidereal and non-sidereal tracking, enabling observations of fast-moving objects such as comets and asteroids.

Automated Telescope for Variability Studies (ATVS – 50cm)
ATVS is a fully robotic 50cm CDK telescope system from PlaneWave Instruments, designed for continuous monitoring of variable astrophysical phenomena.
The system operates remotely and includes a cloud sensor, all-sky camera, dome control, and automated safety systems. All drivers and automation software are developed in-house.
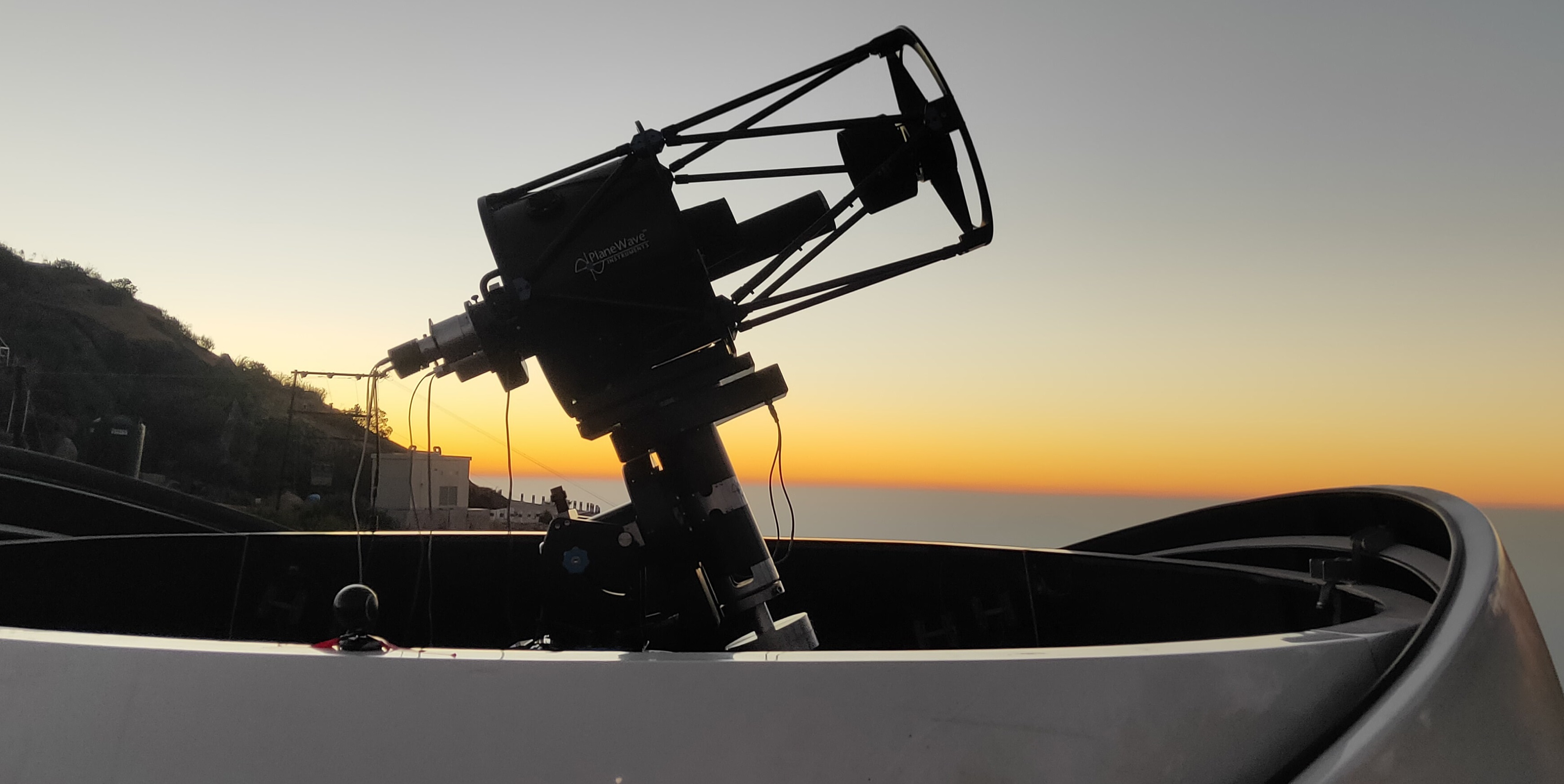
43cm Telescope
The 43cm telescope is a PlaneWave CDK17 system operational since January 2019, primarily used for exoplanet transit follow-up observations.
It supports multiple CCD cameras and standard Bessel BVRI filters, offering wide-field imaging capabilities.
The system achieves millimagnitude-level photometric precision using defocused imaging techniques.